人とロボットの協調
村上俊之研究室ではロボティクス・人間の動作解析・知能制御を応用し、「人とロボットの協調」をテーマとした研究をしています。また、毎年世界各地で開催されている学会に積極的に参加し論文誌に投稿することで、研究成果を日本のみならず世界に発表しています。ここでは研究テーマの一例を紹介します。
▼ 移動モビリティ ▼ 人支援・動作解析 ▼ 協働ロボット ▼ その他

村上俊之研究室ではロボティクス・人間の動作解析・知能制御を応用し、「人とロボットの協調」をテーマとした研究をしています。また、毎年世界各地で開催されている学会に積極的に参加し論文誌に投稿することで、研究成果を日本のみならず世界に発表しています。ここでは研究テーマの一例を紹介します。
▼ 移動モビリティ ▼ 人支援・動作解析 ▼ 協働ロボット ▼ その他
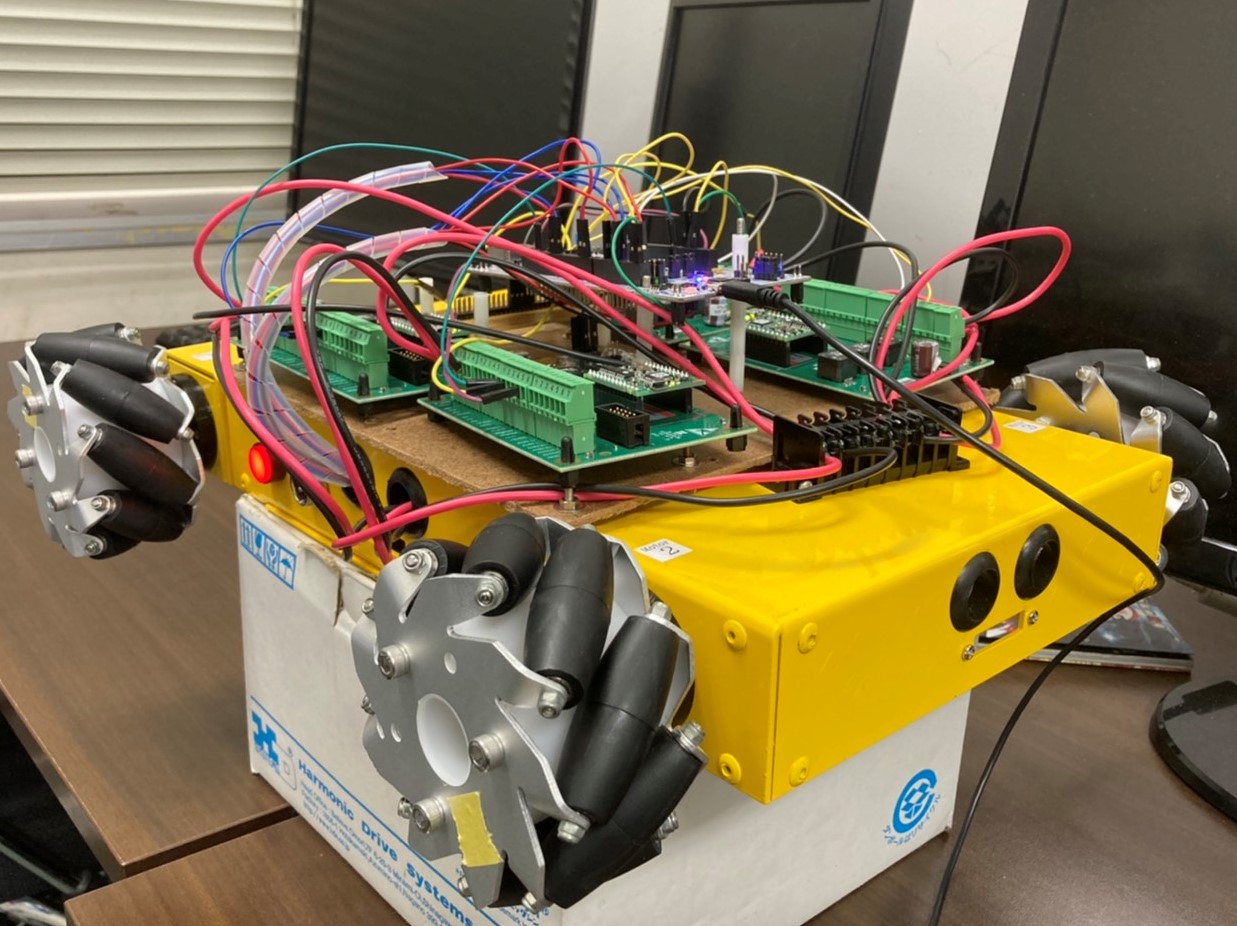
全方向移動ロボットは小さなローラを配置した特殊な車輪を使用することで、通常の直進動作・旋回動作に加えて横方向にも移動することができるロボットです。 障害物の多い環境や狭い屋内でもスムーズに移動することができ、複数台のロボットによって物を運搬する協調制御の研究も行っています.
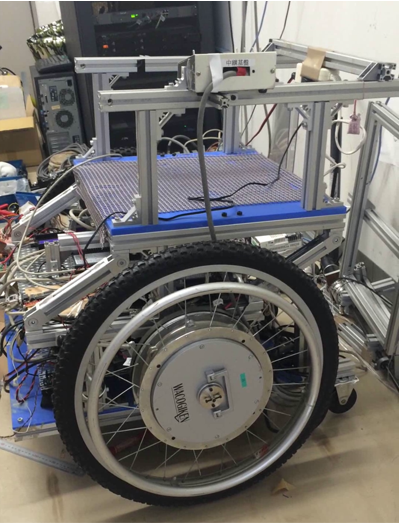
従来の車椅子はキャスタがついており、このキャスタが原因で小さな段差を乗り越えることができません。 そこで、キャスタのない二輪の車椅子とすることで段差の乗り越えが可能になります。しかし二輪だと不安定となってしまうので、バランスを取るように制御を行い安定化させます。
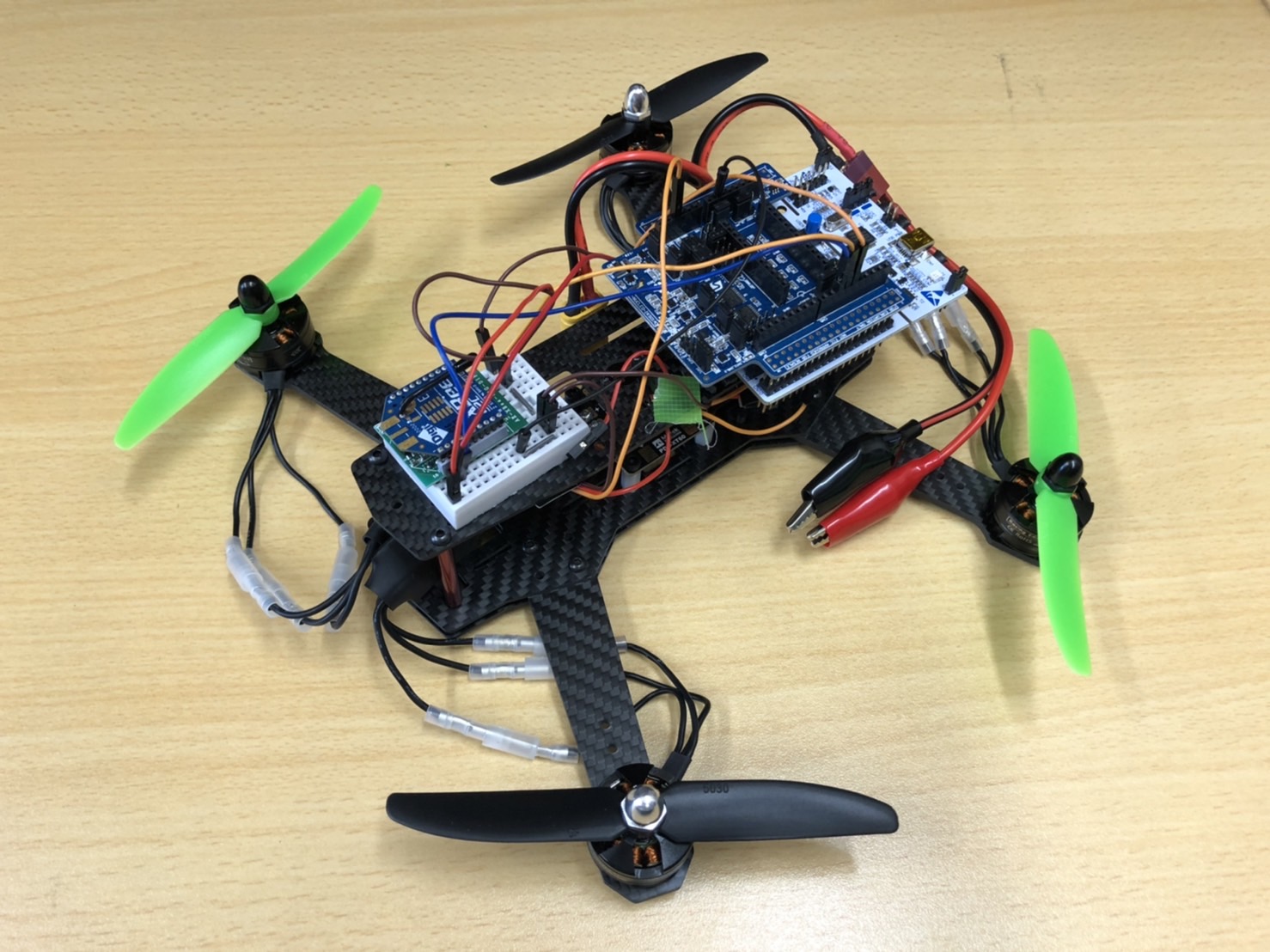
ドローン自体はすでに市販もされるほど普及していますが、村上研究室では力制御の技術を応用して様々な課題解決を目指しています。 例えば、空中で荷物を掴む研究や水中を自在に動く水中ドローンの研究を行っています。
外骨格ロボットとは、高齢者や障害者の動作を補助するロボットスーツのようなアシスト機器です。 外骨格ロボットが出力するトルクを人体モデルに基づき適切に制御することで、「荷物を持ち上げる」といった動作をアシストできます。

人支援のアシストロボットやリハビリロボットの研究をする上で、人間の動作を測定し視覚化する必要があります。 村上研究室では加速度センサなどを用いて、歩行パラメータや人体の力学的なパラメータを推定する研究を行っています。

村上研究室では人を支援するロボットとして、例えば電動歩行補助器の研究が行われていました。 この歩行補助器では人の動作をセンシングし、歩行、停止に加えて寄りかかりの状態を検出して制御に反映させています。
バイラテラル制御とは、人が操作する “マスタロボット” と実際に遠隔地で作業を行う “スレーブロボット” に対し、位置情報・力覚情報を双方向に伝達するシステムのことです。 バイラテラル制御を用いることで人間にとって危険な環境である、原子力発電所や宇宙空間、深海などでの作業を離れた場所から容易に行うことができるようになります。
技術が発展した現代においても、ロボットが人間と同じように運動することは困難です。 また、様々な運動における人間の体の働きについても未だ解明されていないところがたくさんあります。 二足歩行ロボットの研究は、ただ単に二足の移動ロボットの研究ではなく、人間の行動原理の研究でもあります.
近年、地球環境に負荷が少ない “再生可能エネルギー” が注目されています。風力発電は今後世界的に増えていくとてもホットな話題であり、村上研究室でも風力発電に関する研究を行っています。 例えば、高風速時に安全に運転するための制御についての研究を行っています。
